Activity 11: Camera Calibration
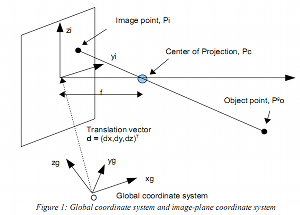
In this activity, we calibrate a camera to determine the mapping of each location (3D) on an object to its camera image (2D). This is shown in the figure below from Dr Soriano’s lecture.
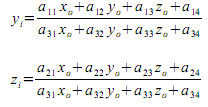
After some algebra, we are lead to this equation where the “o” subscript refer to the object and the “i” subscript refer to the image. As can be seen, the there are only two equation for the mapping since the image is flat.
In matrix form, the above equation is written as
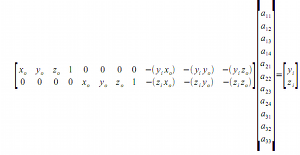
However, this is for a single image, and we have to append the Q and d matrix as we increase the number of points that will be used to determine the mapping. In compact matrix form, we have
We can solve for the transformation matrix a using some matrix algebra which results to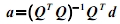
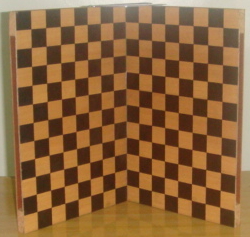
The image that we have obtained by taking a picture of the checker board is shown below. The location of the points used in determining the mapping is shown in my program.
x=[0 0 0 0 1 1 2 0 1 0 3 1 0 3 0 2 0 0 0 1 ];
y=[0 1 0 3 0 0 0 1 0 5 0 0 2 0 2 0 5 3 0 0 ];
z=[0 12 3 2 1 2 5 8 1 3 8 9 6 10 7 7 9 10 9];
yi=[127 139 126 164 115 115 102 139 113 191 90 114 152 88 152 101 193 166 125 112];
zi=[200 187 169 161 172 189 175 123 73 200 161 73 57 112 40 91 97 58 138 56];
obj=[];
im=[];
for i=0:length(x)-1
obj(2*i+1, :)=[x(i+1) y(i+1) z(i+1) 1 0 0 0 0 -yi(i+1).*x(i+1) -yi(i+1).*y(i+1) -yi(i+1).*z(i+1)];
obj(2*i+2, :)=[0 0 0 0 x(i+1) y(i+1) z(i+1) 1 -zi(i+1).*x(i+1) -zi(i+1).*y(i+1) -zi(i+1).*z(i+1)];
im(2*i+1)=yi(i+1);
im(2*i+2)=zi(i+1);
end
a=inv(obj’*obj)*obj’*im;
a(12)=1.0;
a=matrix(a, 4, 3)’;
testx=1;
testy=0;
testz=2;
ty=(a(1,1)*testx+a(1,2)*testy+a(1,3)*testz+a(1,4))/(a(3,1)*testx+a(3,2)*testy+a(3,3)*testz+a(3,4));
tz=(a(2,1)*testx+a(2,2)*testy+a(2,3)*testz+a(2,4))/(a(3,1)*testx+a(3,2)*testy+a(3,3)*testz+a(3,4));
ty
tz
We’ve verified that this works with error of a few pixels. As of the moment, more accurate methods of getting the points is needed for a more accurate calibration. In our data, the actual pixel values of (1,0,2) are (114, 172) while the value from the calibration is (122, 177). A possible source of error, other than inaccuracy in getting the pixel values is radial distortion (as was mentioned by Dr Soriano). Another source of error is the high resolution of the image which causes error in choosing which pixel is the corner of the board.
I give my self 9.5/10 because of some inaccuracies encountered. Although i am satisfied enough with the result.
Tnx to Julie for the help with the image. 🙂

Leave a comment